State Diagram
A state diagram describes the behavior of systems by a finite number of states with corresponding transitions.
Diagram Model
Name |
Graphical Representation |
Description |
|---|---|---|
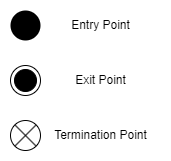
Pseudo States |
|
Entry and exit points are used to start and stop the state machine. The termination point is used for abnormal exiting. |
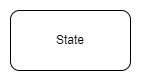
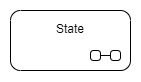
State |
|
A simple state defines a situation where certain well-defined conditions are valid. The current state of an object is called active state. |
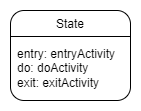
State Activities |
|
Entry, do and exit activities can be specified within the state element. |
Transition |
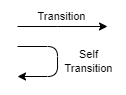
|
A transition is a directed relationship that describes a change from source state to target state (which can be the same state). A transition is triggered by events:
Events can be ignored, can trigger a state change or can trigger state internal actions without state change. |
Sub-State Machine |
|
This element specifies a state which is detailed in another diagram. |
Composite State |
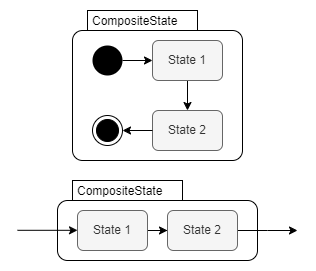
|
Also defines a sub-state machine, but the internal states are modelled directly in the same diagram. A composite state can have own entry and exit points or the internal states are directly connected to the other states. |
Decision |
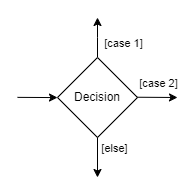
|
Usually a decision is modelled by different transitions from one state to other states. But in some cases a decision can make a diagram more readable and reduce complexity. |
Fork and Join |

|
This can be used to model parallel states in different threads, cores, etc. |
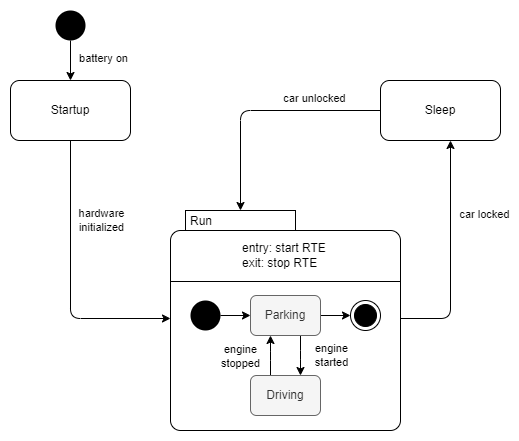
Example