Hardware Testing Guide
ReferenceApp Test Guide
Hardware Set Up
Hardware Required
common
S32K148 Evaluation Board (EVB)
USB micro-B
12 V power supply
Testing CAN:
PEAK CAN USB Dongle and cable
Testing ADC:
Variable Power Supply – 0 to 5v
Testing PWM:
Digital Oscilloscope
Physical Connection
Common
Connect USB micro-B cable between Evaluation Board and Laptop
Connect 12-volt power supply to EVB.
Testing CAN:
Connect EVB CAN Header Pin to the PEAK CAN Device as below.
Header Pin in EVB
D Port in PEAK CAN
CAN L
Pin 2
CAN H
Pin 7
Connect PEAK CAN USB cable to Laptop.
Testing ADC:
Connect Variable Power Supply to ADC Input.
Variable Power
TP in EVB
+ve Connector
TS9
Gnd Connector
GND
Testing PWM:
Connect DSO probe to PWM output pin
LED
Blue
PTE23
J5-5
Channel - 3
Green
PTE22
J5-3
Channel - 2
DSO
TP in EVB
+ve Connector
Any channel
Gnd Connector
GND
Testing IO:
- Connect LED to IO pin
LED
Red
PTE21
J5-1
Channel - 1
Flash the Software
Launch S32 Design Studio (We tested on S32 Design Studio for ARM Version
2.2).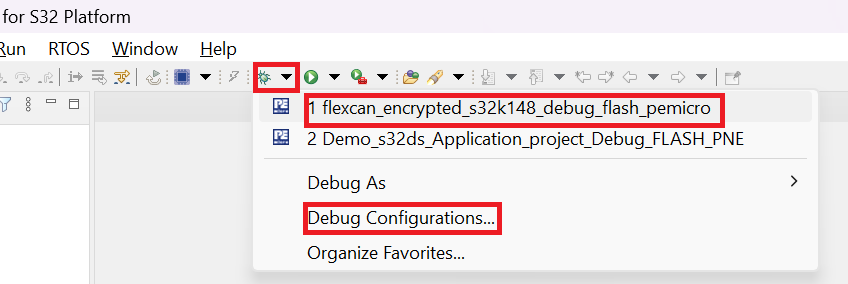
Select Debug Configuration
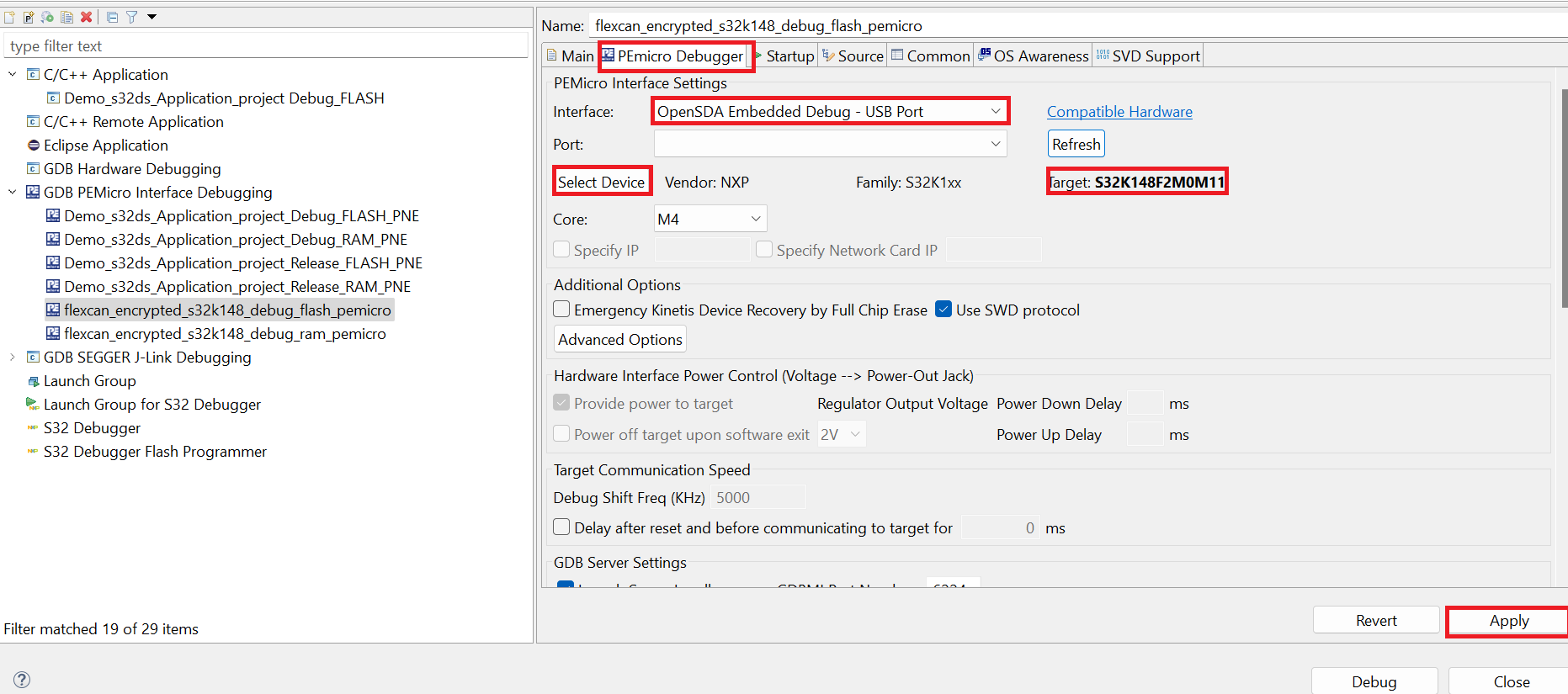
Under Debugger tab, select the proper Interface and device: S32k148
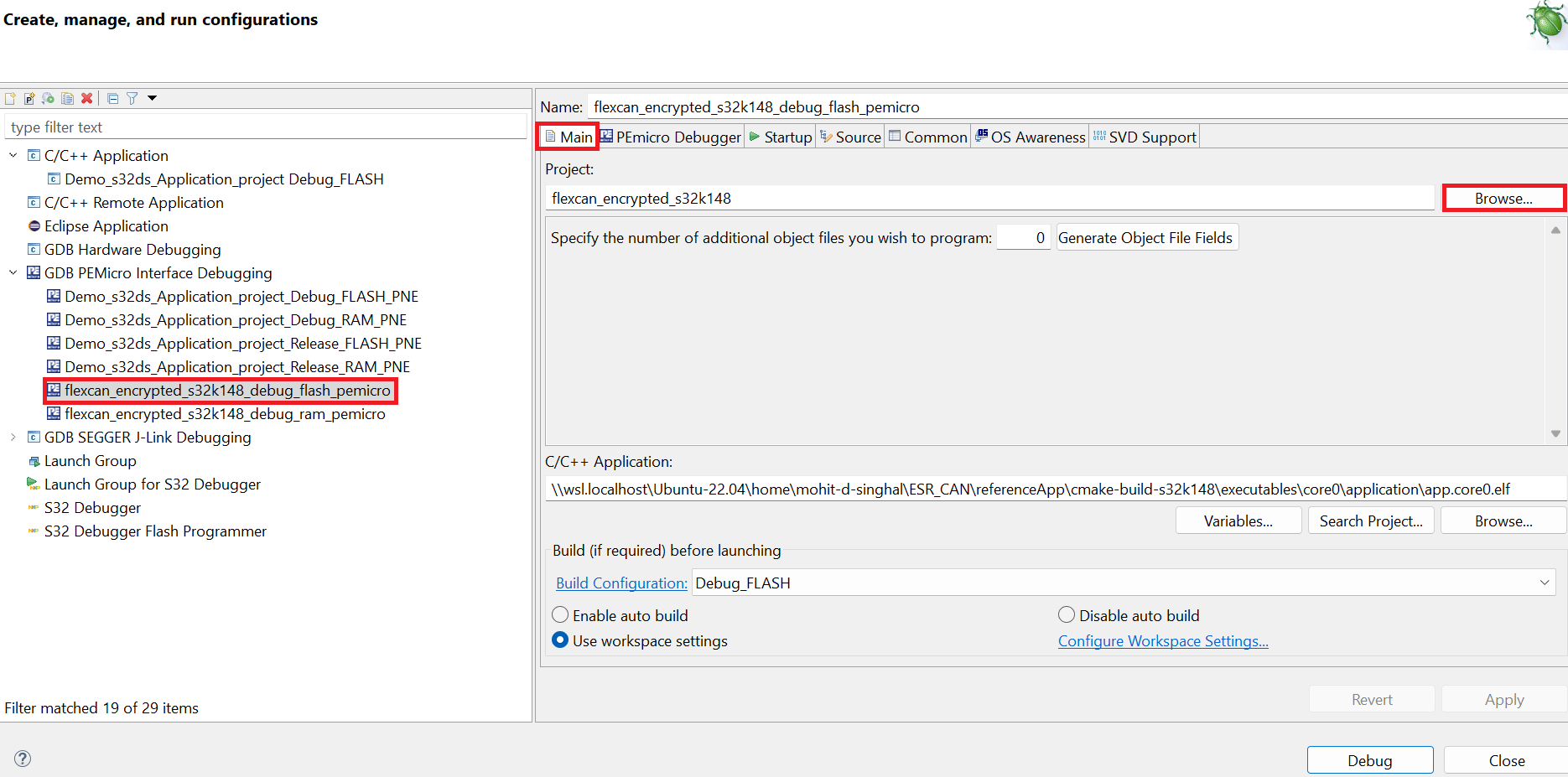
Under Main tab, browse and select the elf file to flash on target
For more information, refer to this link Flash, debug and test serial console on Windows
Configure Tera Term for Serial Debug
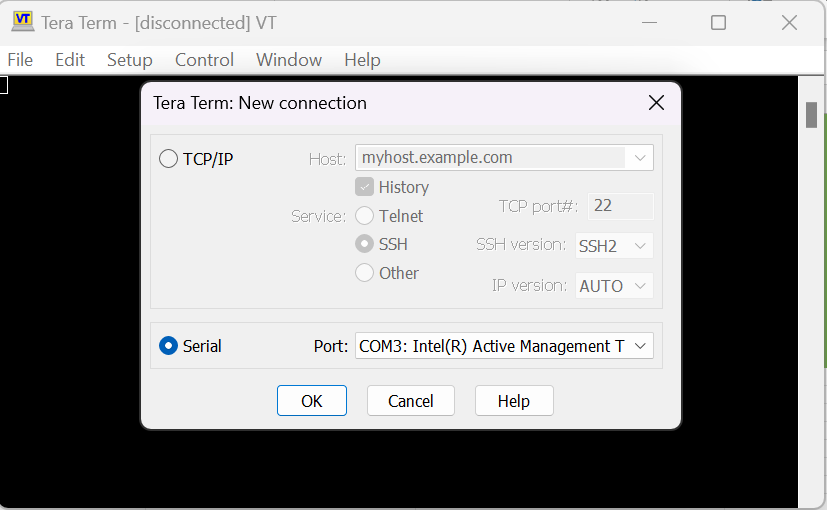
Start Tera Term.
Select the radio button labeled “Serial.”
Choose the COM port from the drop-down menu for the device you want to connect to and click “OK.”
Click on “Setup” in the menu bar and select “Serial Port.”
In the Serial Port Setup menu, configure the protocols as follows:
Tera Term should now be properly configured for serial communication with EVB.
Testing Sequence: ADC
Open Tera Term console.
Give command “adc get 0” in Tera Term to read ADC Channel 0 (which is connected to Variable Power Supply. Adc Raw value and mV Scaled value will print.
Vary the voltage using Variable power supply (Range: 0 – 5v) and ensure the values are matching.
adc get 0 Adc Channel 0: AiEval_Poti_ADC -> : 1064 (raw) 1299 mv (scaled) ok 412993: RefApp: CONSOLE: INFO: Received console command "adc get 0" 413000: RefApp: CONSOLE: INFO: console command Succeeded
Testing Sequence: PWM
Duty Cycle of PWM can be changed using 2 ways: through potentiometer or through console command.
Changing PWM Duty cycle through potentiometer: By changing the position of potentiometer, the duty cycle of PWM can be changed.
Changing PWM Duty cycle through console command:
Stop DemoSystem lifecycle using command lc level 7
lc level 7 ok 10133: RefApp: CONSOLE: INFO: Received console command "lc level 7" 10134: RefApp: CONSOLE: INFO: console command Succeeded 10135: RefApp: LIFECYCLE: INFO: Shutdown level 8 10135: RefApp: LIFECYCLE: INFO: Shutdown demo 10136: RefApp: LIFECYCLE: DEBUG: Shutdown demo done 10136: RefApp: LIFECYCLE: DEBUG: Shutdown level 8 done
Through tera term change duty cycle to 20 % using command
help ok 6937: RefApp: CONSOLE: INFO: Received console command "help" 7036: RefApp: CONSOLE: INFO: console command Succeeded pwm set 1 2000 PWM channel 1 (eval_led_green_pwm) set to 0x7d0 % On 19355: RefApp: CONSOLE: INFO: Received console command "pwm set 2 2000" 19360: RefApp: CONSOLE: INFO: console command Succeeded
pwm set channel # value from 0-10000 pwm set 1 2000
For 50% duty cycle use command: pwm set 1 5000
This command can be used to change the duty cycle for all available channels (currently - 3). Duty cycle can be changed from 0-100 % using values from 0 – 10000.
The following are the screenshots saved from DSO for 20, 50 and 80% duty cycle.
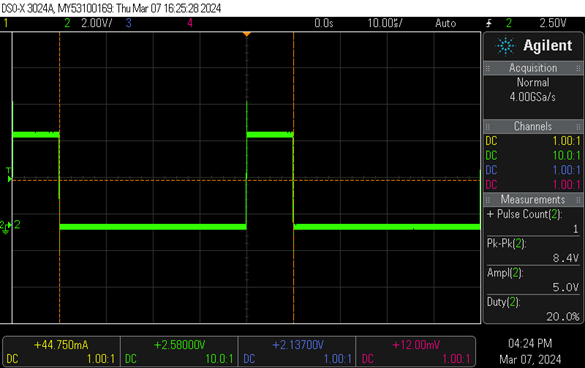
20% duty cycle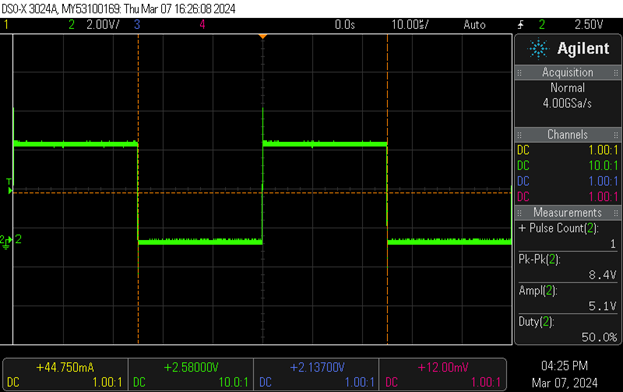
50% duty cycle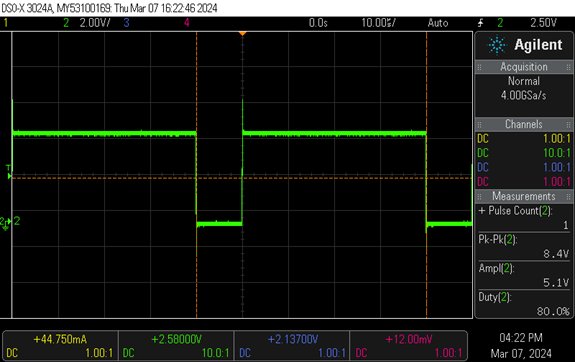
80% duty cycle
Testing Sequence: CAN
Sending CAN messages using vcan.
Send command
On the terminal stop DemoSystem lifecycle using command lc level 7
CAN frames sent can be seen as shown below.
The CAN send command allows you to send a frame with a specified ID and data bytes. Upon successful execution, the console will return an ok message, confirming that the frame has been sent:
can send 1 2 3 4 5 6 7 8 ok RefApp: CONSOLE: INFO: Received console command "can send 1 2 3 4 5 6 7 8" RefApp: CONSOLE: INFO: Console command succeeded
Info command
CAN info command provides information about the CAN bus.
This command retrieves and displays the current CAN bus information.
Upon successful execution, the console will return the number of CAN buses:
can info CanBus : 2 ok RefApp: CONSOLE: INFO: Received console command "can info" RefApp: CONSOLE: INFO: Console command succeeded
Sending CAN messages using EVB and PEAK CAN
Open Tera Term console.
CAN frames sent can be seen as below.
71022: RefApp: DEMO: DEBUG: Sending frame 1 72022: RefApp: DEMO: DEBUG: Sending frame 2 73022: RefApp: DEMO: DEBUG: Sending frame 3 74022: RefApp: DEMO: DEBUG: Sending frame 4 75022: RefApp: DEMO: DEBUG: Sending frame 5
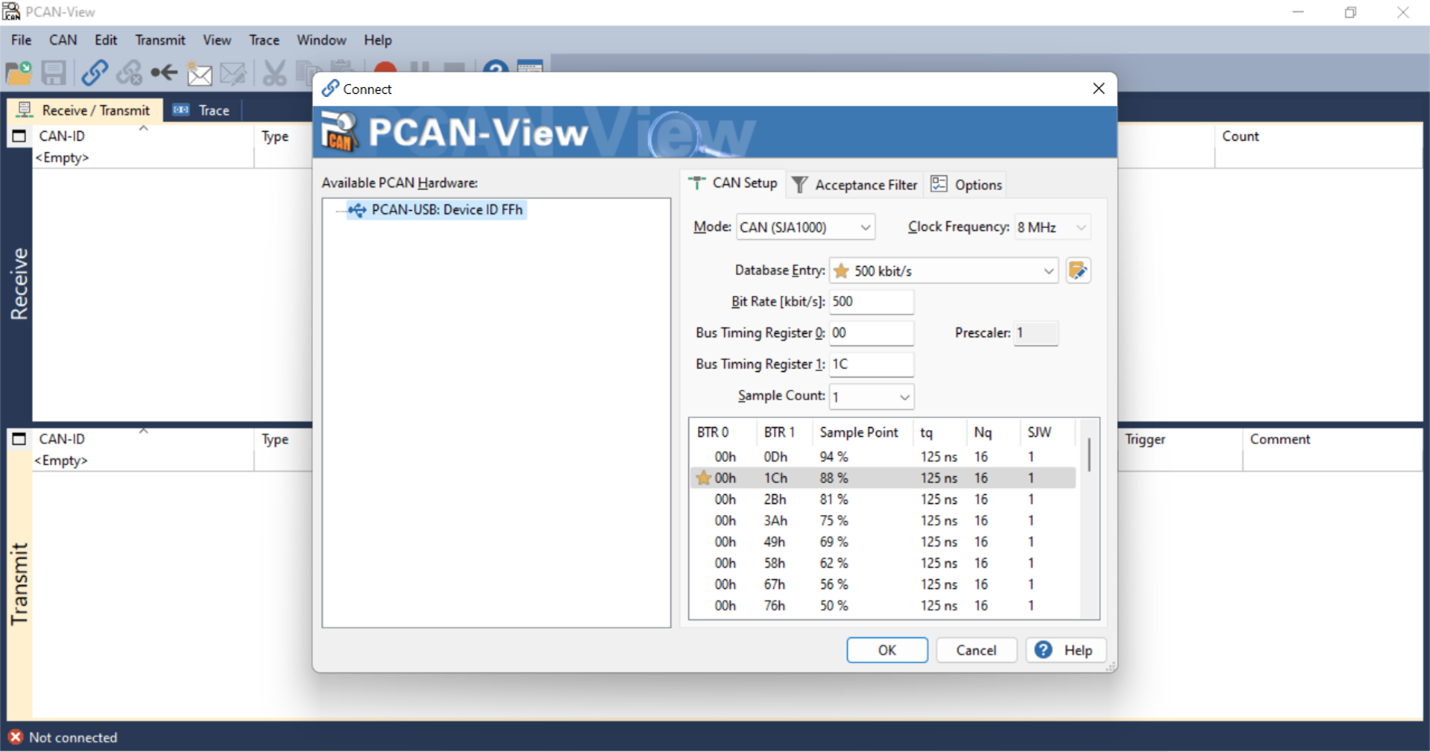
Open PCAN viewer. Configure Bitrate and other parameters as shown below
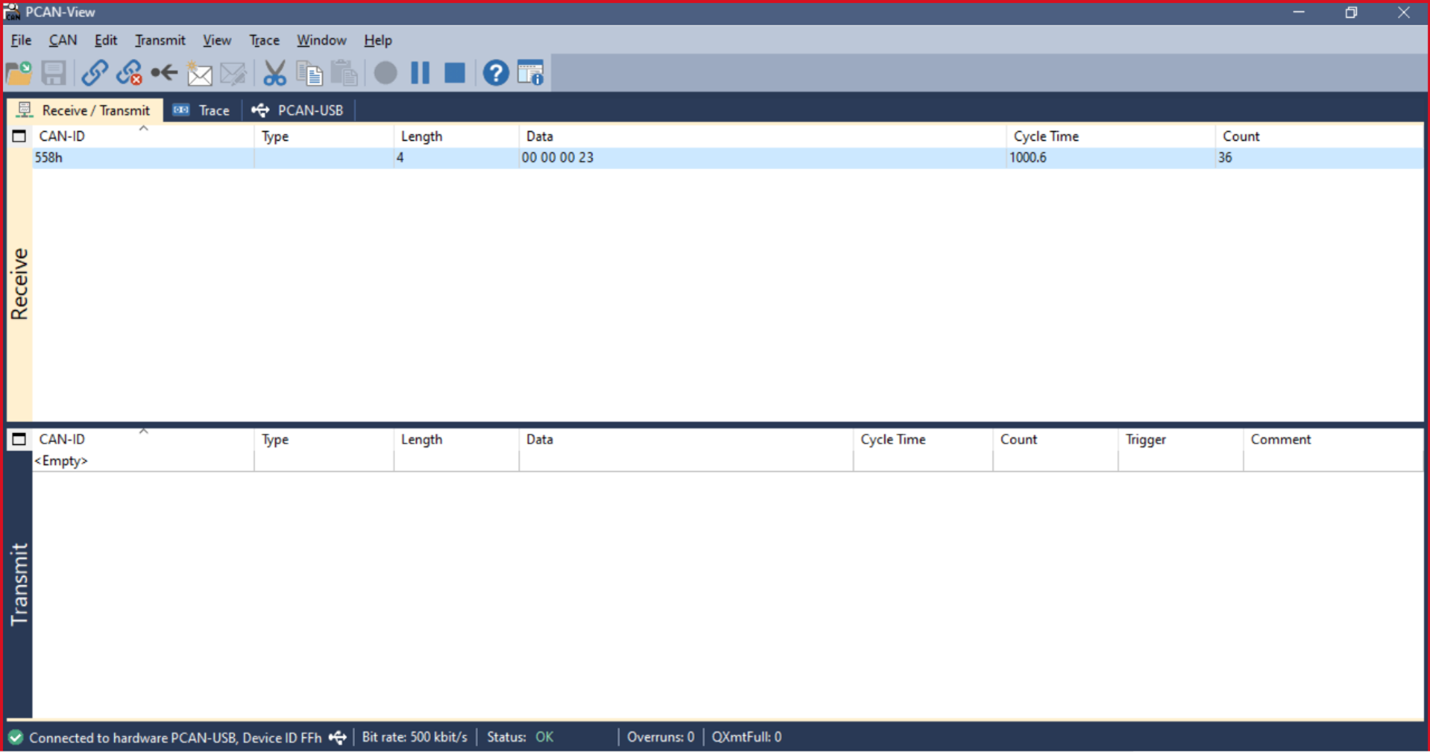
CAN frames sent can also be seen in the PCAN viewer as shown
Testing Sequence: IO
IO can be verified using 2 ways: through pressing the switch button sw3 on EVB or through console command.
By pressing the switch button sw3 on EVB, the RED LED can be turned on. Here sw3 acts as input and RED LED as output.
Changing the IO through console command:
out set 1 1
help ok out set 1 1 1 : EVAL_LED_RED -> ok ok 330162: RefApp: CONSOLE: INFO: Received console command "out set 1 1" 330166: RefApp: CONSOLE: INFO: console command Succeeded