Diagnostic dispatcher
Overview
The DiagDispatcher2 class manages UDS jobs and handles the dispatching of incoming and outgoing
requests and responses. Messages are dispatched by calling the send() function with the
corresponding message as an argument. This approach ensures that incoming and outgoing messages are
queued for sequential processing.
For the dispatcher to function properly, the order in which jobs are added is important.
This ensures that the jobs are organized correctly to build the intended job hierarchy.
The following diagram illustrates an example of such a hierarchy, where the DiagJobRoot
node is positioned at the top of the hierarchy:
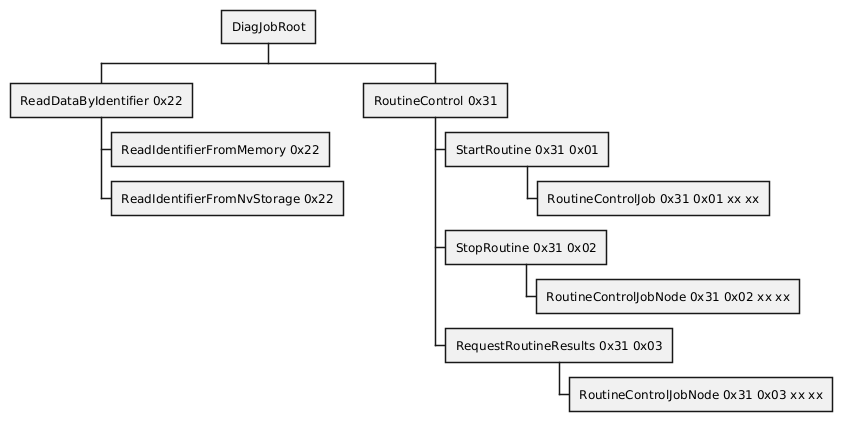
In the example provided, there are two direct children of the root job:
ReadDataByIdentifier (SID 0x22)
RoutineControl (SID 0x31)
with their corresponding children on lower levels of hierarchy. When processing an incoming message (e.g., a request from a tester), the children are traversed until the child with the corresponding SID is found.
Examples
As mentioned earlier, the order in which jobs are added to the dispatcher is crucial: the parent must be added first, followed by the children, and then the grandchildren, and so on. It is still possible to start adding children to a different branch of the hierarchy; however, it is important to ensure that the order of adding parents and children within the same branch of the hierarchy is maintained.
ReadDataByIdentifier readDataByIdentifier;
ReadIdentifierFromMemory _read22Cf01;
ReadIdentifierFromNvStorage _read22Cf02;
void createDispatcher(DiagnosisConfiguration& configuration,
IDiagSessionManager& sessionManager,
DiagJobRoot& jobRoot,
::async::ContextType context)
{
static DiagDispatcher2 udsDispatcher(configuration, sessionManager, jobRoot, context);
// to properly add _read22Cf01 it must be added after readDataByIdentifier!
udsDispatcher.addAbstractDiagJob(_read22Cf01); // will not be added
udsDispatcher.addAbstractDiagJob(readDataByIdentifier);
udsDispatcher.addAbstractDiagJob(_read22Cf01);
}
Properly setting up the CAN communication the ECU will respond to the messages:
cansend vcan0 02A#0322CF0100000000
cansend vcan0 02A#0322CF0200000000
Diagnostics Configuration
The DiagnosisConfiguration class is passed to the DiagDispatcher and stores key information,
including:
The number of incoming connections
The number of outgoing connections (usually 1)
The maximum number of incoming messages that can be held in the queue
The UDS address of the server (ECU)
The bus ID
Other important details, including boolean flags
Connection Manager
The connection manager of type DiagnosticSessionControl is another essential parameter passed to
the DiagDispatcher during its construction. This manager handles the following tasks:
Switching between sessions
Managing timeouts for extended sessions
Monitoring the “Tester Present” heartbeat